Строго говоря, единой системы еще не существует, но ее прообраз – две основных системы (GPS и ГЛОНАСС) и несколько вспомогательных (EGNOS, WAAS, MSAS, CWAAS, GAGAN, SNAS и LAAS – расшифровка и описание в таблице) – уже помогают путешественникам, морякам, летчикам и военным «найти свой путь в тумане».
Как все начиналось
Идея глобальной спутниковой группировки, по сигналам которой можно было бы определять свое местоположение и скорость, пришла ученым из Applied Physics Laboratory (APL) при университете имени Джонса Хопкинса (Мэриленд) в 1957 году, вскоре после того, как СССР запустил первый искусственный спутник Земли. Проект назывался TNSS (спутниковая навигационная система «Транзит») и был сдан в эксплуатацию в 1964 году. Сначала «Транзит» использовали только военные моряки, но в 1967 году к нему допустили и гражданских пользователей. Система прожила до 1996 года, и на протяжении трех десятилетий 99,86% времени служила без сбоев. На «Транзите» были отработаны основные элементы современных спутниковых навигационных систем: созданы сверхточные источники времени, расположенные на спутниках, и предложено вещание на двух частотах для преодоления эффекта рассеивания сигнала в атмосфере Земли. Ответом СССР послужила аналогичная, в целом, система «Цикада». Обе системы обладали общими недостатками – сеанс определения длился от 5 до 15 минут, спутников было мало, из-за чего приходилось ждать сеанса от получаса до двух часов, да и точность определения – 70–100 м – оставляла желать лучшего.

 |
| Зная р-код, приемник определяет задержку |
  |
| У каждого спутника свой р-код |
Разработка GPS (глобальной спутниковой навигационной системы) началась в APL в 1973 году. Первый спутник будущей системы был запущен в 1978-м, а вся система вошла в строй в 1994 году. Когда началась разработка ГЛОНАСС – это тайна, покрытая мраком, но первый спутник (Космос-1414) был запущен в 1982 году, а систему объявили работоспособной в 1996-м. Системы GPS и ГЛОНАСС довольно похожи, и принципы их работы мы будем обсуждать на примере GPS, так как она гораздо более открыта.
 | |
Две окружности на плоскости могут пересечься где угодно,
|
Как это работает
Мы специально опросили коллег и знакомых и пришли к выводу: хотя многие из них думают, что понимают принципы работы GPS, цельной картины нет практически ни у кого. Итак, на высоте примерно 20 200 км над уровнем моря летают 24 основных спутника, которые разбиты на шесть орбитальных плоскостей, а чуть в стороне от них – 3 дополнительных спутника. Плоскости обозначаются буквами от A до F, а спутники в каждой из плоскостей нумеруются от 1 до 4. Все спутники (называются они Navstar) сделаны в лабораториях компании Rockwell. Каждый весит чуть больше 850 кг и совершает полный оборот вокруг земного шара примерно за 11 часов 58 минут. Размер спутника с полностью раскрытыми солнечными батареями – чуть больше 5 м. Наземному наблюдателю одновременно видно от 4 до 12 спутников (поэтому и приемники бывают от «4-канальных» до «12-канальных»). Каждый спутник передает на двух частотах – L1 (1575.42 МГц) и L2 (1227.60 МГц) цифровой сигнал, который представляет собой псевдослучайную последовательность (p-код), причем каждый спутник имеет свое «зерно» для генератора псевдослучайных чисел. Кстати, приемник идентифицирует спутник, отправивший сигнал, исходя как раз из содержимого принятой последовательности.
Мы специально опросили коллег и знакомых и пришли к выводу: хотя многие из них думают, что понимают принципы работы GPS, цельной картины нет практически ни у кого. Итак, на высоте примерно 20 200 км над уровнем моря летают 24 основных спутника, которые разбиты на шесть орбитальных плоскостей, а чуть в стороне от них – 3 дополнительных спутника. Плоскости обозначаются буквами от A до F, а спутники в каждой из плоскостей нумеруются от 1 до 4. Все спутники (называются они Navstar) сделаны в лабораториях компании Rockwell. Каждый весит чуть больше 850 кг и совершает полный оборот вокруг земного шара примерно за 11 часов 58 минут. Размер спутника с полностью раскрытыми солнечными батареями – чуть больше 5 м. Наземному наблюдателю одновременно видно от 4 до 12 спутников (поэтому и приемники бывают от «4-канальных» до «12-канальных»). Каждый спутник передает на двух частотах – L1 (1575.42 МГц) и L2 (1227.60 МГц) цифровой сигнал, который представляет собой псевдослучайную последовательность (p-код), причем каждый спутник имеет свое «зерно» для генератора псевдослучайных чисел. Кстати, приемник идентифицирует спутник, отправивший сигнал, исходя как раз из содержимого принятой последовательности.
Но хватит фактов. Рассмотрим, как это все применяется в жизни, то есть что происходит внутри GPS-приемника.

Вначале любопытный факт – все слышали, что «систему вещания CDMA придумали американские военные». Но мало кто отдает себе отчет, что ее придумали специально для использования в проекте Navstar-GPS. В CDMA все передатчики вещают на одной и той же частоте, но их сигналы не мешают друг другу (мы подробно расскажем про CDMA в одном из следующих номеров). Таким образом, у гражданского приемника GPS всего один радиомодуль (у военного – два, так как он должен принимать и сигнал на второй частоте). Из этого следует, кстати, что количество «каналов» приемника (их бывает от 4 до 12) зависит исключительно от мощности использованного процессора.
Вначале любопытный факт – все слышали, что «систему вещания CDMA придумали американские военные». Но мало кто отдает себе отчет, что ее придумали специально для использования в проекте Navstar-GPS. В CDMA все передатчики вещают на одной и той же частоте, но их сигналы не мешают друг другу (мы подробно расскажем про CDMA в одном из следующих номеров). Таким образом, у гражданского приемника GPS всего один радиомодуль (у военного – два, так как он должен принимать и сигнал на второй частоте). Из этого следует, кстати, что количество «каналов» приемника (их бывает от 4 до 12) зависит исключительно от мощности использованного процессора.
 |
Три сферы пересекаются только в двух точках пространства Cначала приемник регистрирует передачу со спутника и фиксирует в памяти от 4 до 12 Cначала приемник регистрирует передачу со спутника и фиксирует в памяти от 4 до 12 |

Для определения своего местоположения нам нужно знать не только расстояние до каждого из спутников, но и их точное положение. Но откуда известно, где именно в момент передачи сигнала находился данный спутник? Ответ на этот вопрос очень прост. Астрономия – точная наука, и все орбиты спутников GPS прекрасно известны. Приемник всегда «знает», в какой именно точке находится любой из спутников – эти данные хранятся в его памяти. Но дело, конечно, не только в астрономии. Американские военные ведут за спутниками постоянное наблюдение, и, если орбита изменилась, пускай даже на самую малость, со станции управления приходит команда внести временную поправку в излучаемый сигнал, чтобы компенсировать зафиксированные отклонения.
После этого происходит так называемая спутниковая триангуляция. Для этого на плоскости нужны две точки, а в пространстве – три. Радиосигнал распространяется во все стороны, так что представим вокруг каждого из трех спутников сферу, радиус которой определяется временем, прошедшим с момента передачи сигнала. Две сферы пересекаются в пространстве, образуя кольцо, а три сферы пересекаются только в двух точках, причем лишь одна из них может находиться на разумном расстоянии от поверхности Земли. На рисунке показан пример спутниковой триангуляции. Затем в ход идет школьная физика: скорость света умножаем на время, затраченное сигналом на преодоление расстояния от спутника до приемника. Но для точного замера времени необходимо, чтобы часы приемника и передатчика были жестко синхронизированы. Ведь даже если часы приемника спешат (или отстают) всего на 0,001 с, погрешность будет в районе 300 км! Как этого добиться? Когда проектировали GPS, никто и не мечтал о карманных атомных часах (их, кстати, сделали только в конце 2004 года), а традиционные атомные часы стоят от 50 до 100 тысяч долларов и никак не подходят для ношения с собой. Как быть?

И только теперь в игру вступает четвертый спутник (зачем бы еще система обеспечивала видимость по крайней мере четырех спутников в любой момент времени, в любой точке земного шара?!). Но для простоты на время забудем, что мы имеем дело с трехмерным миром, и посмотрим, как дело обстояло бы на плоскости. Допустим, у нас есть две окружности, которые пересекаются в точке (вторая точка нас не интересует, так как она явно «неправильная»). Если мы верно замерили время, то проблем нет. Но что, если мы ошиблись? Тогда окружности пересекутся совсем в другой точке! Чтобы справиться с этой проблемой, введем третью окружность. Что это дает, если мы все равно не знаем, какова погрешность? Дело в том, что, поскольку часы на всех спутниках синхронизированы между собой (еще бы, они атомные!), мы уверены, что ошибка для всех трех окружностей будет одинаковой. Поэтому все три окружности могут пересечься только в одной точке.

Теперь вернемся в трехмерный мир и применим полученные знания. Четвертый спутник служит для коррекции определения времени, что и позволяет очень точно определить расстояние до каждого из Navstar’ов. Кстати, именно поэтому у любого GPS-приемника по крайней мере 4 «канала». Одно следствие: любой исправный GPS-приемник может служить идеальным источником точного времени.

Но в жизни не бывает, чтобы все было просто и замечательно. Между спутником и приемником лежит 250 км воздуха – атмосфера нашей планеты. Из них самые неприятные для радиосигнала – 200 км ионосферы и 50 км тропосферы: в первой полно заряженных частиц, во второй – водяных испарений. Поэтому наши прежние рассуждения, верные для вакуума, требуют корректировки.
Существует два метода коррекции – моделирование, когда мы просто прикидываем, как сегодня должен бы проходить сигнал, и гораздо более сложный процесс, при котором сравнивается прохождение двух сигналов на разных частотах. Проблема с двухчастотным методом заключается в том, что вторая частота доступна только военным. Некоторым компаниям-изготовителям приемников удалось обойти это ограничение, но каким именно образом, держится в строжайшем секрете. Однако решение «для всех» существует, и называется оно D-GPS, или дифференциальный GPS.
Внешняя поправка
Кто сказал, что система должна быть замкнутой? Большинство GPS-приемников умеют принимать сигнал D-GPS. Идея здесь очень простая. Возьмем, например, местную радиостанцию. Ее географические координаты известны абсолютно достоверно. Если на ней разместить GPS-приемник, он сможет в реальном времени сравнивать вычисленные данные со своими настоящими координатами и вычислять погрешность в данной точке. Если эту погрешность передавать в эфир (делается это на поднесущей какой-нибудь из частот FM-диапазона), приемник, снабженный D-GPS-модулем, сможет учитывать ошибку и определять свои координаты гораздо точнее. Но наземными поправками дело не ограничивается – все-таки бОльшая часть земного шара необитаема (там и суши-то нет). Поэтому для того, чтобы точные координаты могли получать и летчики, и моряки, разные страны повесили на геостационарных орбитах спутники, которые делают ту же работу, что и наземные точки D-GPS. Идея очень простая – несколько центров слежения на земле (в американской системе WAAS таких центров 24) вычисляют каждый свою погрешность и «поднимают» эти данные на геостационарный спутник, который транслирует сигнал вниз. Умный приемник, определив свои координаты, возьмет погрешность ближайшего к нему центра корректировки и будет учитывать ее. Здесь целый букет систем. Каков предел точности для D-GPS? Строго говоря, его нет. Никто не мешает совместить спутниковые системы с новомодными Wi-Fi сетями и определять свое местонахождение с точностью до микрометров, даже внутри помещений. Представляете картину – конструктор спроектировал дорогу, а полностью автоматический комплекс ее построил! Или хирурга, который, закончив операцию, на экране указал, где что зашить, и спокойно отправился пить кофе.
Внутренняя поправка
Но даже без всяких дополнительных источников сигнала можно добиться точности 3–4 мм! Вряд ли об этом задумывались создатели GPS, ведь в те времена никто не предвидел, что в кармане у вас может оказаться компьютер, способный выполнять сотни миллионов операций в секунду, но современные технологии позволяют сделать то, о чем раньше нельзя было и мечтать. Дело в том, что концепция GPS основана на анализе модулированного сигнала, p-кода, частотой 1 MHz. Как мы уже выяснили, приемник воссоздает р-код, «выравнивая» его с принятым, и получает время задержки и расстояние до спутника. Но ведь кроме модулированного сигнала есть еще и несущая частота, которая в случае GPS в полторы тысячи раз выше! Но если p-код специально создан для того, чтобы его было легко сравнивать с образцом, то несущая частота для этого не предназначена. Но если вначале засинхронизироваться примерно, при помощи p-кода, потом уже не так сложно при помощи огромных вычислительных ресурсов современных процессоров вычислить и поправку, исходя из несущей частоты. Это и даст вожделенные 3–4 мм. Звучит невероятно, но в самое ближайшее время такие приемники ожидаются на рынке.
Теперь вернемся в трехмерный мир и применим полученные знания. Четвертый спутник служит для коррекции определения времени, что и позволяет очень точно определить расстояние до каждого из Navstar’ов. Кстати, именно поэтому у любого GPS-приемника по крайней мере 4 «канала». Одно следствие: любой исправный GPS-приемник может служить идеальным источником точного времени.
Но в жизни не бывает, чтобы все было просто и замечательно. Между спутником и приемником лежит 250 км воздуха – атмосфера нашей планеты. Из них самые неприятные для радиосигнала – 200 км ионосферы и 50 км тропосферы: в первой полно заряженных частиц, во второй – водяных испарений. Поэтому наши прежние рассуждения, верные для вакуума, требуют корректировки.
Существует два метода коррекции – моделирование, когда мы просто прикидываем, как сегодня должен бы проходить сигнал, и гораздо более сложный процесс, при котором сравнивается прохождение двух сигналов на разных частотах. Проблема с двухчастотным методом заключается в том, что вторая частота доступна только военным. Некоторым компаниям-изготовителям приемников удалось обойти это ограничение, но каким именно образом, держится в строжайшем секрете. Однако решение «для всех» существует, и называется оно D-GPS, или дифференциальный GPS.
Внешняя поправка
Кто сказал, что система должна быть замкнутой? Большинство GPS-приемников умеют принимать сигнал D-GPS. Идея здесь очень простая. Возьмем, например, местную радиостанцию. Ее географические координаты известны абсолютно достоверно. Если на ней разместить GPS-приемник, он сможет в реальном времени сравнивать вычисленные данные со своими настоящими координатами и вычислять погрешность в данной точке. Если эту погрешность передавать в эфир (делается это на поднесущей какой-нибудь из частот FM-диапазона), приемник, снабженный D-GPS-модулем, сможет учитывать ошибку и определять свои координаты гораздо точнее. Но наземными поправками дело не ограничивается – все-таки бОльшая часть земного шара необитаема (там и суши-то нет). Поэтому для того, чтобы точные координаты могли получать и летчики, и моряки, разные страны повесили на геостационарных орбитах спутники, которые делают ту же работу, что и наземные точки D-GPS. Идея очень простая – несколько центров слежения на земле (в американской системе WAAS таких центров 24) вычисляют каждый свою погрешность и «поднимают» эти данные на геостационарный спутник, который транслирует сигнал вниз. Умный приемник, определив свои координаты, возьмет погрешность ближайшего к нему центра корректировки и будет учитывать ее. Здесь целый букет систем. Каков предел точности для D-GPS? Строго говоря, его нет. Никто не мешает совместить спутниковые системы с новомодными Wi-Fi сетями и определять свое местонахождение с точностью до микрометров, даже внутри помещений. Представляете картину – конструктор спроектировал дорогу, а полностью автоматический комплекс ее построил! Или хирурга, который, закончив операцию, на экране указал, где что зашить, и спокойно отправился пить кофе.
Внутренняя поправка
Но даже без всяких дополнительных источников сигнала можно добиться точности 3–4 мм! Вряд ли об этом задумывались создатели GPS, ведь в те времена никто не предвидел, что в кармане у вас может оказаться компьютер, способный выполнять сотни миллионов операций в секунду, но современные технологии позволяют сделать то, о чем раньше нельзя было и мечтать. Дело в том, что концепция GPS основана на анализе модулированного сигнала, p-кода, частотой 1 MHz. Как мы уже выяснили, приемник воссоздает р-код, «выравнивая» его с принятым, и получает время задержки и расстояние до спутника. Но ведь кроме модулированного сигнала есть еще и несущая частота, которая в случае GPS в полторы тысячи раз выше! Но если p-код специально создан для того, чтобы его было легко сравнивать с образцом, то несущая частота для этого не предназначена. Но если вначале засинхронизироваться примерно, при помощи p-кода, потом уже не так сложно при помощи огромных вычислительных ресурсов современных процессоров вычислить и поправку, исходя из несущей частоты. Это и даст вожделенные 3–4 мм. Звучит невероятно, но в самое ближайшее время такие приемники ожидаются на рынке.
Общие принципы определения координат с помощью GPS
Основой идеи определения координат GPS-приемника является вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные содержатся в принятом со спутника альманахе). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется трилатерацией.

Если известно расстояние А до одного спутника, то координаты приемника определить нельзя (он может находится в любой точке сферы радиусом А, описанной вокруг спутника). Пусть известна удаленность В приемника от второго спутника. В этом случае определение координат также не представляется возможным - объект находится где-то на окружности (она показана синим цветом на рис.2), которая является пересечением двух сфер. Расстояние С до третьего спутника сокращает неопределенность в координатах до двух точек (обозначены двумя жирными синими точками на рис.2). Этого уже достаточно для однозначного определения координат - дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близи от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, теоретически для трехмерной навигации достаточно знать расстояния от приемника до трех спутников.
Однако в жизни все не так просто. Приведенные выше рассуждения были сделаны для случая, когда расстояния от точки наблюдения до спутников известны с абсолютной точностью. Разумеется, как бы ни изощрялись инженеры, некоторая погрешность всегда имеет место (хотя бы по указанной в предыдущем разделе неточной синхронизации часов приемника и спутника, зависимости скорости света от состояния атмосферы и т.п.). Поэтому для определения трехмерных координат приемника привлекаются не три, а минимум четыре спутника.
 |
| рис В |
 Получив сигнал от четырех (или больше) спутников, приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке.
Получив сигнал от четырех (или больше) спутников, приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке.Следует отметить, что точность определения координат связана не только с прецизионным расчетом расстояния от приемника до спутников, но и с величиной погрешности задания местоположения самих спутников. Для контроля орбит и координат спутников существуют четыре наземных станции слежения, системы связи и центр управления, подконтрольные Министерству Обороны США. Станции слежения постоянно ведут наблюдения за всеми спутниками системы и передают данные об их орбитах в центр управления, где вычисляются уточнённые элементы траекторий и поправки спутниковых часов. Указанные параметры вносятся в альманах и передаются на спутники, а те, в свою очередь, отсылают эту информацию всем работающим приемникам.


Экваториальные координаты. Определить положение точки на Земле помогают географические координаты – широта φ и долгота λ. Определить положение звезд на небесной сфере помогают экваториальные координаты – склонение δ и прямое восхождение α.

Положение любой точки на земном шаре описывается широтой и долготой. Положение любой точки на небесной сфере описывается склонением и прямым восхождением. Небесные координаты. Для экваториальных координат основными плоскостями служат плоскость небесного экватора и плоскость склонений. Отсчет прямого восхождения ведется от точки весеннего равноденствия в сторону, противоположную суточному вращению небесной сферы. Прямое восхождение обычно отсчитывают в часах, минутах и секундах времени, но иногда и в градусах.

Склонение выражается в градусах, минутах и секундах. Небесный экватор делит небесную сферу на северное и южное полушария. Склонения звезд северного полушария могут быть от 0 до 90°, а южного полушария – от 0 до –90°. Высота полюса мира над горизонтом определяется географической широтой места наблюдения: hP = φ.
Думаю в рисунках на полях речь идёт о постоянной взаимосвязи между Солнцем и планетами солнечной системы,возможно что наши учёные исследуя излучение солнца и отражение этого излучения планетами,создали спутниковую систему.
Россия ,Краснодарский край.

Скорее всего это военный объект вот ссылка на карту http://maps.google.com/maps?ll=44.772402,39.550808&z=13&hl=ru&t=h

Мой знакомый составил схему объекта

а вот и пиктограмма с поля

объект и пиктограмма идентичны,но это не говорит о том ,что это одно и тоже,это говорит о принципе взаимосвязи всего в мире.
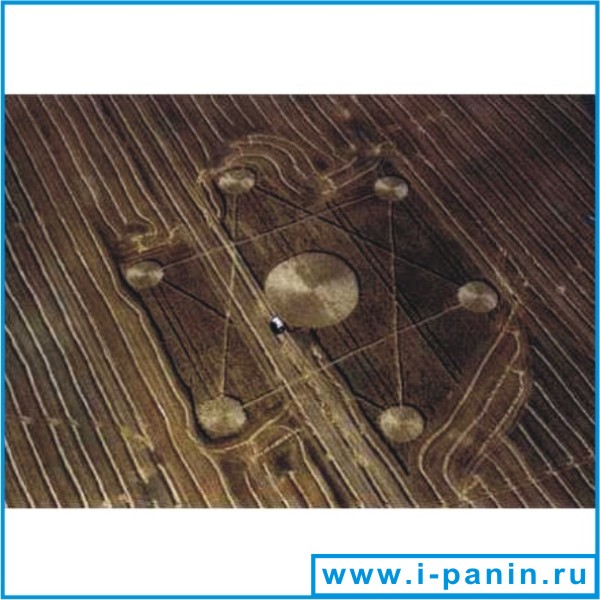



2011год,схема расположение антенн и рисунок на поле идентичны.
Голиаф (радиостанция)
Германия. В 1941 году германским военно-морским министерством в Альтмарке, находящемся к северу от города Кальбе на реке Мильде (левом притоке Эльбы), начато строительство мощного сверхдлинноволнового радиопередатчика. Это передатчик с рабочим диапазоном 15-60 кГц, т.е. на частотах, близких к звуковым.
Он должен был входить в сеть из нескольких сверхдлинноволновых передатчиков для управления немецкими подводными лодками во второй мировой войне и, кроме того, для установления устойчивой и надежной связи между Германией и Японией, союзными государствами во 2-й мировой войне, вместо коротковолновой связи, часто нарушаемой северным сиянием и прочими ионосферными явлениями.
Он должен был входить в сеть из нескольких сверхдлинноволновых передатчиков для управления немецкими подводными лодками во второй мировой войне и, кроме того, для установления устойчивой и надежной связи между Германией и Японией, союзными государствами во 2-й мировой войне, вместо коротковолновой связи, часто нарушаемой северным сиянием и прочими ионосферными явлениями.
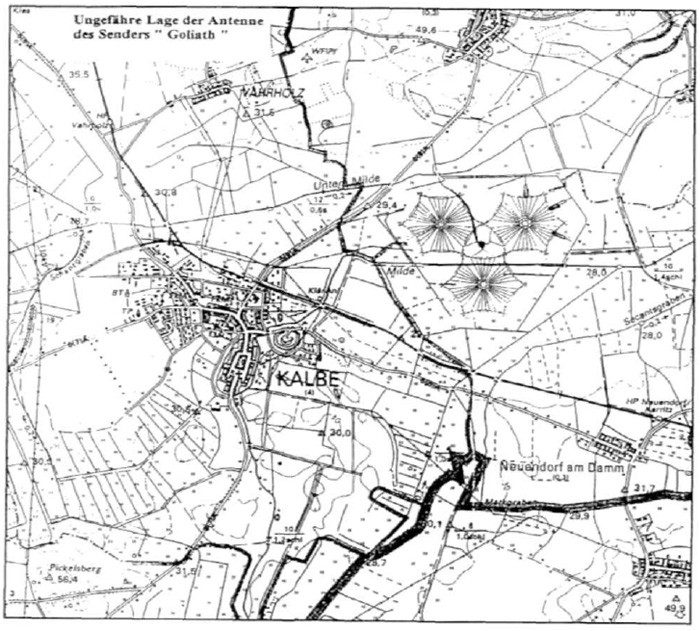
Антенное поле СДВ-радиостанции Goliath

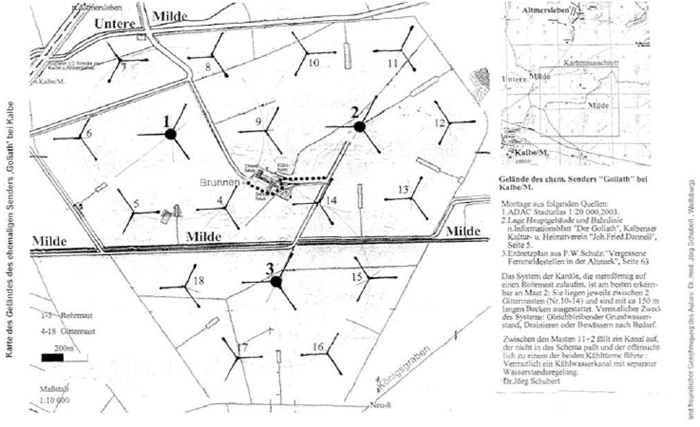
План города Кальбе/Мильде и СДВ-радиостанции Goliath
После захвата Польши, Франции и Голландии германский военно-морской флот имел несколько маломощных СДВ-радиостанций. Основные радиостанции находились в Париже (две), Бордо, Коотвике, Базе-ланде (около Нанта). Резервные радиостанции - две в Бернерове , две в Науене и одна в Лионе.
Для работы на Балтийское море немцы использовали СДВ-радиостанцию в Баранове, около Варшавы. Еще одна германская СДВ-радиостанция находилась в Нидерландской Ост-Индии (современная Индонезия), на острове Ява. Эта СДВ-радиостанция работала на фиксированной частоте 19,23 кГц.
Новый передатчик у Кальбе/Мильде был предназначен преимущественно для работы в режиме радиотелеграфии путем передачи информации азбукой Морзе. На частотах выше 30 кГц можно было передавать факсимильные сообщения с помощью специального пишущего устройства, а выше 45 кГц с использованием модуляции можно было - хоть и с ограниченным качеством - передавать телефонные сообщения.
Рабочие чертежи для строительства были готовы в ноябре 1940 года Строительные работы начались весной 1941 года и велись фирмами «Лоренц», «Шнайдер» и другими. Главный конструктор нового радиопередатчика - инженер Фритц Гутцман. Доктор Гутцман постоянно находился на стройплощадке и решал все возникающие проблемы.
В строительстве широко применялся подневольный труд советских и французских военнопленных. Благо, концлагерь был недалеко, в соседнем городе Гарделенген.
Военнопленные прокладывали траншеи для подземных кабелей. По воспоминаниям свидетелей, жителей Кальбе/Мильде, пленники были очень голодны, подбирали с земли все съедобное, ели даже траву. Первые советские военнопленные начали прибывать на строительство «Голиафа» в сентябре 1941 года. Их привозили по железной дороге непосредственно с советско - германского фронта в вагонах для скота. При открытии дверей вагонов первого эшелона советских военнопленных обнаружилось, что из примерно 300 пленников 8 человек уже умерли, а остальные были неработоспособны. Умерших пленников хоронили снаружи кладбища Альтмерслебена без всякой регистрации.
Недолгое время, до прибытия советских военнопленных, на строительстве «Голиафа» применяли труд французских и польских военнопленных из концлагеря Альтенграбов. Французские военнопленные были заняты, как правило, непосредственно в строительных фирмах и считались там квалифицированным рабочими, которые самостоятельно могли исполнять сложные виды работ. Они питались в столовых вместе с основным кадровым составом немецких строительных фирм.
В целом, по разным оценкам, на строительстве «Голиафа» работало 950 - 1000 человек, из них от 400 до 500 военнопленных. Во время строительства произошло 3 аварии со смертельным исходом. При бетонировании основного технического здания погиб французский военнопленный. При транспортировке решетчатых мачт упряжкой лошадей погиб немецкий рабочий. Во время строительства антенного павильона монтажник оступился и упал с большой высоты.

Из фотоархива Хеннинга Крюгера №05505-22. Советские военнопленные на строительстве радиостанции Goliath. На переднем плане - охранники военнопленных.

Из фотоархива Хеннинга Крюгера №05510-84. Советские военнопленные использовались на земляных работах, при прокладке траншей для кабелей.
Строительство «Голиафа» велось, в зависимости от погоды и сезона, непрерывно, днем и ночью. Субботы и воскресенья были рабочими днями. План строительства «Голиафа» имел высшую степень срочности. Все работы выполнялись одновременно и в большой спешке.
Из-за высокого уровня грунтовых вод возникли большие трудности, тем более что все части технического здания радиостанции имели подвалы. При выемке грунта под подвалы использовался экскаватор весом 50 тонн. Он стоял на деревянной подушке в котловане, среди грунта-плывуна. При движении ковша плывун давал просадку, экскаватор падал.
Дороги на стройплощадке отсыпались из доменного шлака. Дорожная сеть в этом районе вообще была хорошо развита. Туристские велосипедные дороги, дорожки для верховой езды.
Территория и бараки лагеря для военнопленных охранялись. Для всех строителей и инженерного состава предполагалась пропускная система. Вся территория радиостанции, примерно 240 га, была окантована рвом шириной около 2 метров, заполненным водой. Перед рвом забор из колючей проволоки высотой примерно 2 метра.
Охрана «Голиафа» состояла из ландштурмовиков - солдат, уволенных с военной службы по возрасту и болезни. С 1944 года для охраны дополнительно привлекались солдаты из близлежащих гарнизонов, главным образом, из Зальцведеля.
СССР. Апрель 1941 года. Начато строительство автогужевой (шоссейной) дороги Горький - Арзамас - Кулебаки протяженностью 262 километра. Предполагалось за 10 дней, с 20 мая по 1 июня, полностью отсыпать земляное полотно той же длины. Объем предстоящих работ- до 1,5 млн. кубометров земли. В отсыпке полотна должны принять участие около 50 тысяч колхозников.
В дальнейшем, в течение лета 1941 года, предполагалось участие в строительстве дороги 7 тысяч колхозников. Рабочих, колхозников, интеллигенцию, пионеров и школьников призывали активно участвовать в изыскании камня для новой шоссейной дороги, собирать его на улицах и дворах.
Так в пойме реки Кудьма, между селами Ближнее Борисово и Вязовка, появилась шоссейная дорога с булыжным покрытием.
После начала Великой Отечественной войны, летом 1941 года, для увеличения посевных площадей были развернуты мелиоративные работы в пойме реки Кудьма. Эта работа продолжалась и летом 1942 года. Сотни ближне-борисовских, вязовских, митинских ребят и девушек вместе с молодёжью Богородского района корчевали и убирали лес, прорывали осушительные канавы, расчищали болота, строили плотины. Было раскорчевано 1125 гектаров, осушено 2000 га болот, очищено от леса 1308 га. Лозунг «Все для фронта, все для победы» стал главнейшим для всей страны.
















Комментариев нет:
Отправить комментарий